Catamaran steering examples |
|
Catamaran steering examples |
|

![]()
Example 225
shows an Erik Lerouge catamaran with a typical push-pull solution with two
so called idler (or tiller) shafts. This solution is as close as you can get to
a direct cross bar connection between the rudders. The tiller shafts are very
light running in roller bearings (just like the rudder shafts), so there is no
friction in the system and no backlash. The tillers have a much better position
to the cockpit than the original rudder shafts. Some boats we equipped had both
tillers (for close wind racing) and a
mechanical transmission steering
(see green parts above and side view below). The steering system is an addition
to the tiller system which makes the system modular expandable. By the use of an
electro-mechanical autopilot
drive DD1, at either the port or starboard (or both) rudder, an independent,
friction free autopilot drive system is created. The long draglinks are normally
made of aluminum tubing. When weight is a very important issue, the crossing
tube is made in composite (by the yard) and we can deliver the end pieces to it.

![]()
A side view of the transmission steering linkage to the tiller shafts. As nearly all parts are in aluminum and on roller/ball bearings, a light and friction free solution is created. Mentionable is the very direct and responsive steering solution achieved by the above solution which will make the cat a pleasure to sail by hand. Please also notice the optional transmission autopilot drive unit connected to the bevel box underneath the steering bevel box.

Going through the system in detail, starting from the rudder: On most catamarans the top of the rudder blade is not perpendicular to the rudder stock. The best bottom bearing to use is the 6Txxx series. The PETP bearing is glued in a GRP housing which can be made too long at the bottom (called offset). After laminating, the excess tube can be grinded off. Due to the GRP tubing, the bonding to the hull is superb. The tube can be extended upwards to bring the water ingress point as high as possible and closed with a gaiter. The 4SxxxZ series bearings are mostly the most ideal solution as it combines a self-aligning bearing, with a vertical ball bearing (the rudder hangs in it) and a deck cover for the emergency tiller.
The idler shaft should be strong, light and very accurate in diameter to avoid any backlash, so aluminum is the best option. We use high tolerance AL6082 shafts available in Ø35 and Ø50 mm in length to suit the customer. In the above ship, non self-aligning bearings type 42xxx were used. They have to be installed with a bed of sicaflex or epoxy primer under the flange to align them to the shaft. The 5Txxx self-aligning bearings are a bit more expensive, but much faster to install. Above deck the Ø35 or Ø50 mm tiller head is mounted to the shaft.
![]()

Example 226 shows a rod push-pull system driven by a rack and pinion pedestal. This solution is a very stiff, backlash free and light running solution to link both rudders and drive them with a steering system.


The pedestal used on this boat is the RP750 (see Cad library) which is ideal when the yard wants to define their own pedestal, but all rack and pinion pedestals can be used. The R&P limits the maximum amount of turns to 1.8 (equivalent to 72°-80° rudder movement). So when more turns are required, the rack and pinion system can't be used, and a transmission system can be used.

The rack and pinion pedestal drives via the red lever the (blue) idler shaft which rotates backlash free and without friction in the self-aligning roller bearings (green). One tiller is used for linking the other rudder and one drives the rudder via the yellow draglink.
In some cases it is not possible to make the crossing bar in
one piece. A short third idler shaft with roller bearing and lever can act as
middle support so the length of the tube is cut in half. See the below detail.

Please click the below image when you want to open a 3D model
of this system in Adobe PDF format. You can look at the model from all sides.
![]()

Example 227 shows a push-pull rack and pinion solution. When there is room in the catamaran for these direct connections, this system is preferred over all alternatives as there is nothing as stiff, direct, robust and light running as the above solution.

The pedestal used on this boat is the RP750 (see
Cad library) which is ideal when the yard wants to define their own
pedestal, but all rack and
pinion pedestals can be used. The R&P limits the maximum amount of turns to
1.8 (equivalent to 72°-80° rudder movement). So when more turns are required,
the rack and pinion system can't be used, and a transmission system can be used.
The RP750 is equipped with twin output levers. One to drive the rudder and one
to achieve the linkage to the other rudder. Please note the
DD1 autopilot drive unit
driving the RP750 output lever.

![]()
Please click the
above image when you want to open a 3D model
of this system in Adobe PDF format. You can look at the model from all sides.

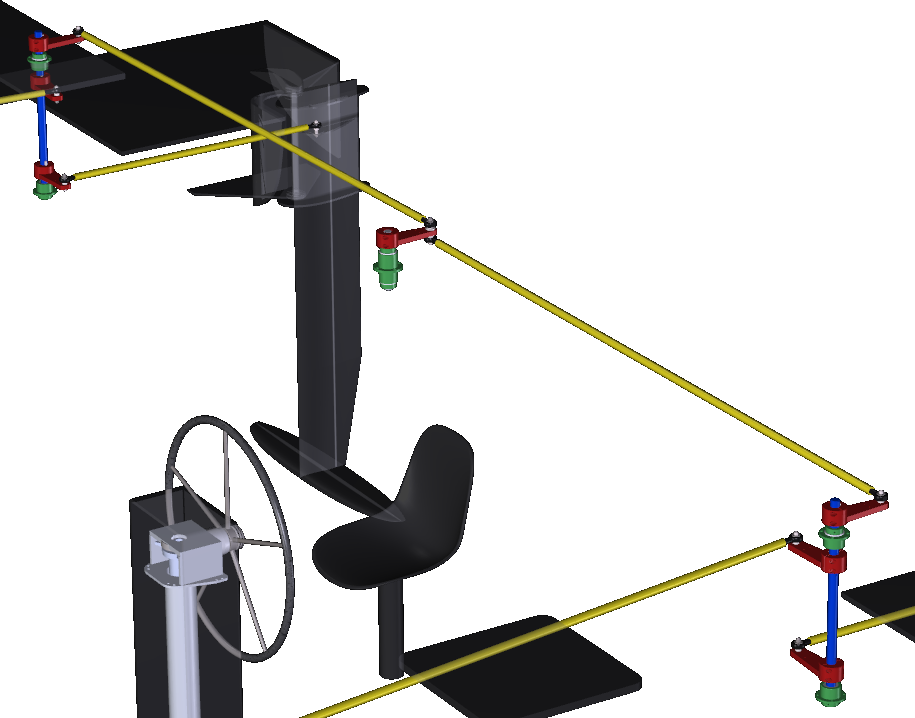
Example 228: Solution as used on the
Outremer 49 &
51 catamarans. The connection between the rudders is routed via two tiller
shafts, levers and draglinks achieving a very efficient manual steering. Each
tiller shaft has a steering tiller attached above deck. The cat also has a
steering wheel which drives the starboard tiller shaft via a conduit cable
system. The steering wheels are always equipped with a wheel disengagement unit,
so they don't rotate and one can't feel their inertia while steering with the
tillers and on autopilot.

System seen from the port aft side. Please note the (green)
DD1 autopilot drive unit
driving the starboard tiller shaft.

![]()
Please realize the cable in conduit system will generate more friction than a
transmission drive system. Due to the nature of conduit outer cable, it can't be
tensioned firmly, so some backlash will always be t=present in the wheel. It is
however cheaper to purchase and simpler to install.
Please click the
above image when you want to open a 3D model
of this system in Adobe PDF format. You can look at the model from all sides.
![]()
![]()